Документация
Автор: Morph · Опубликовано 12.04.2019 · Обновлено 12.04.2019
На русском языке.
На английском языке.
Данное руководство пользователя достаточно объёмное, поскольку состоит из нескольких частей, а именно:
- System overview of STEP 7 and WinCC. Programming and Operating Manual.
- What’s new in TIA Portal. Programming and Operating Manual.
- Readme. Programming and Operating Manual.
- Installation. Programming and Operating Manual.
- Migrating projects and programs. Programming and Operating Manual.
- Introduction to the TIA Portal. Programming and Operating Manual.
- Editing projects. Function Manual.
- Editing project data. Programming and Operating Manual.
- Using user administration. Programming and Operating Manual.
- Using libraries. Programming and Operating Manual.
- Editing devices and networks. Programming and Operating Manual.
- Programming the PLC. Programming and Operating Manual.
- WinCC. Visualizing processes. System Manual.
- Using technology functions. Programming and Operating Manual. (использование энкодера, ПИД-регулирования, контроль перемещения).
- Using online and diagnostics functions. Programming and Operating Manual.
- Processing energy data. Programming Manual. (использование Energy Suite).
- Using Team Engineering. Programming and Operating Manual.
Скачать
Автор: Morph · Published 16.01.2019 · Last modified 26.02.2019
Источник статьи: http://tia-portal.ru/manual/
Уроки TIA Portal, STEP7 и HMI
Урок 14
Программирование в TIA Portal обмена данными по сети PROFINET между преобразователем частоты ATV630 и контроллером SIMATIC S7-1500
Задание
Сконфигурировать ПЧ и ПЛК так, чтобы ПЛК мог получать данные о состоянии ПЧ по сети PROFINET, и написать программу обработки данных в ПЛК.
Решение
- В качестве ПЧ возьмём Altivar Process ATV600, у которого на борту есть 3 разъёма RJ45:
Первый – для подключения графического дисплея:
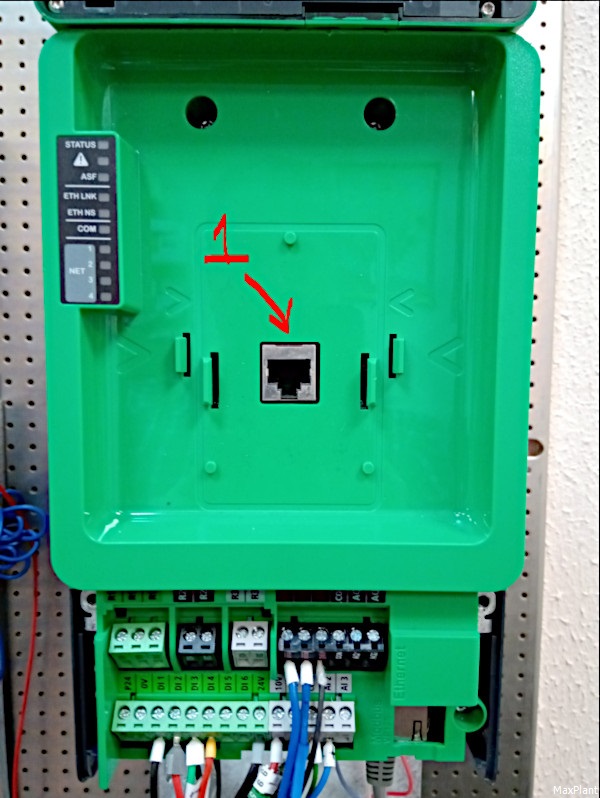
Второй – для подключения к сети Ethernet Modbus TCP.
Третий – для подключения к последовательной шине Modbus RTU:

В правый слот расширения установим опциональный коммуникационный модуль PROFINET с двумя разъёмами RJ45 и к разъёму 4 подключим патчкорд, связывающий ПЧ и ПЛК:

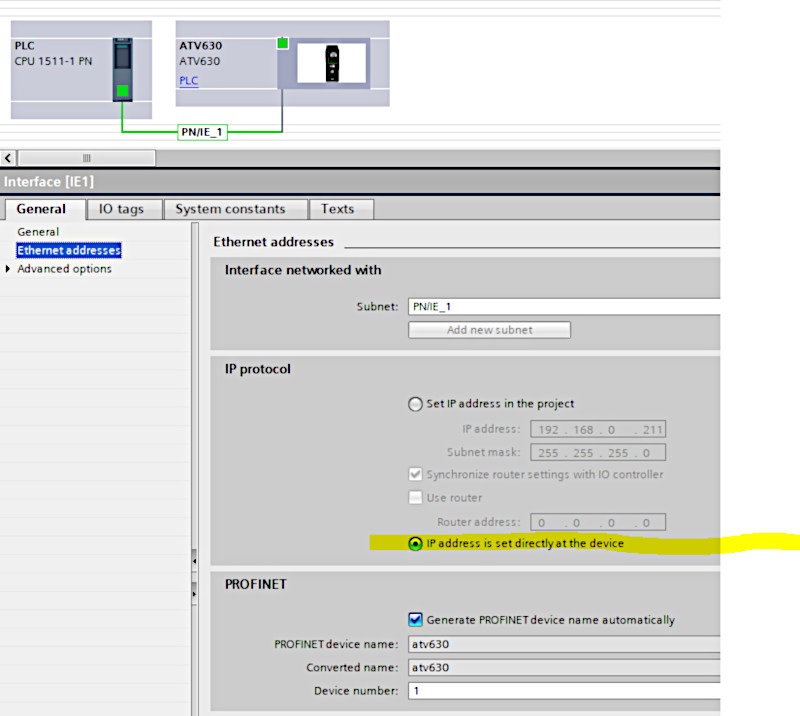
Есть 3 способа задания IP адреса ПЧ в сети PROFINET:
1. Фиксированный (fixed) – адрес задаётся вручную
2. DHCP – динамический адрес назначается автоматически DHCP сервером
3. DCP – фиксированный адрес назначается автоматически DCP сервером (контроллером S7-1500)
Выберем первый вариант и сконфигурируем адрес в TIA Portal:
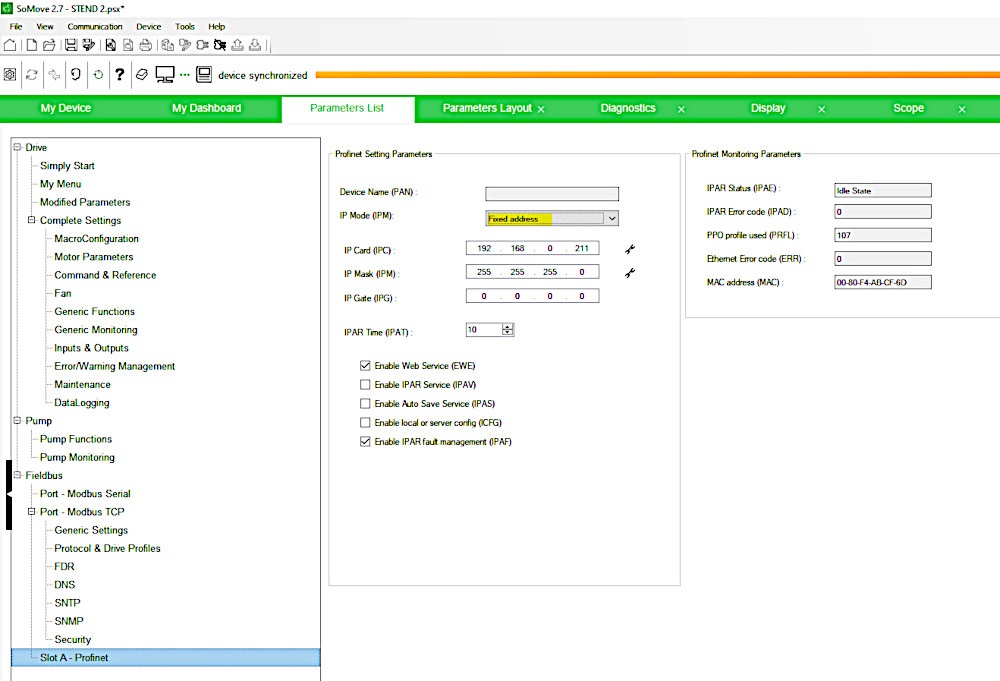
Адрес в ПЧ Altivar ATV600 конфигурируем с помощью программы SoMove:
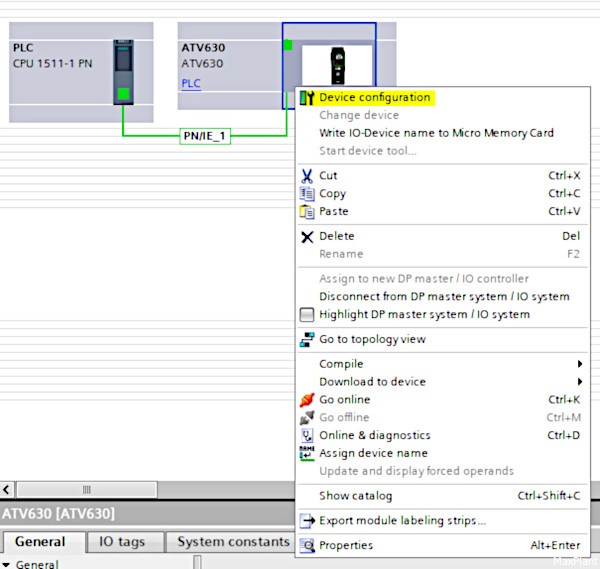
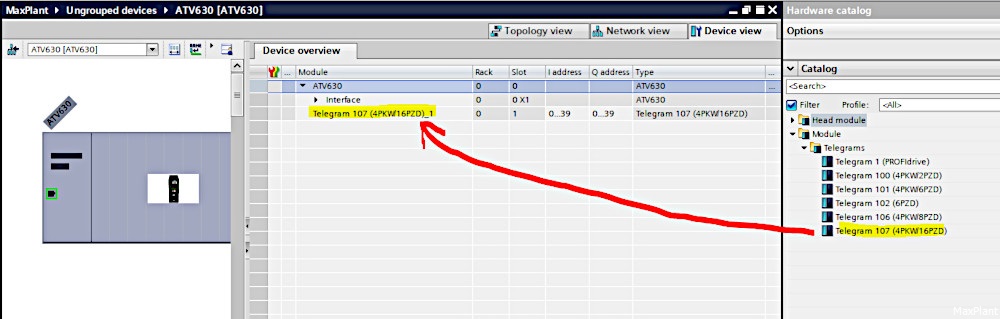
В TIA Portal Network view нажимаем правой кнопкой на ATV630 и выбираем меню Device configuration:
Выбираем подходящую телеграмму, например, Telegram 107, в которой есть 4 слова для управления параметрами (4PKW) и 16 слов для циклического обмена данными (16PZD):
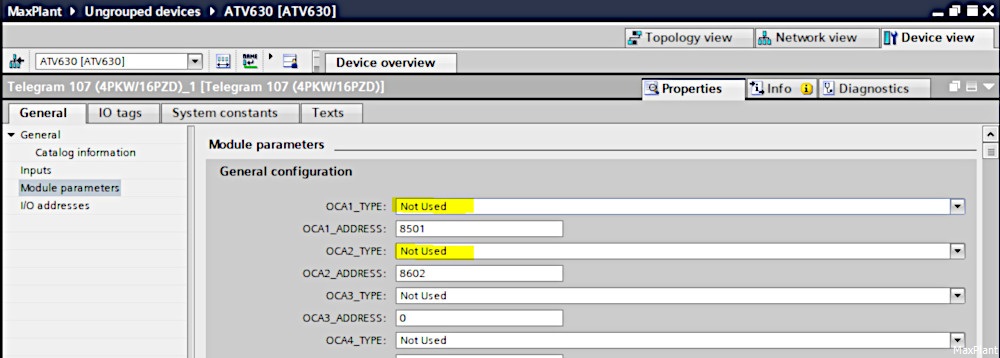
Управлять преобразователем частоты по шине PROFINET мы не собираемся, поэтому деактивируем выходы, которые были активированы по умолчанию:
Свяжем первые 13 из 16 входных слов с данными, которые мы хотим передавать из ПЧ в ПЛК:
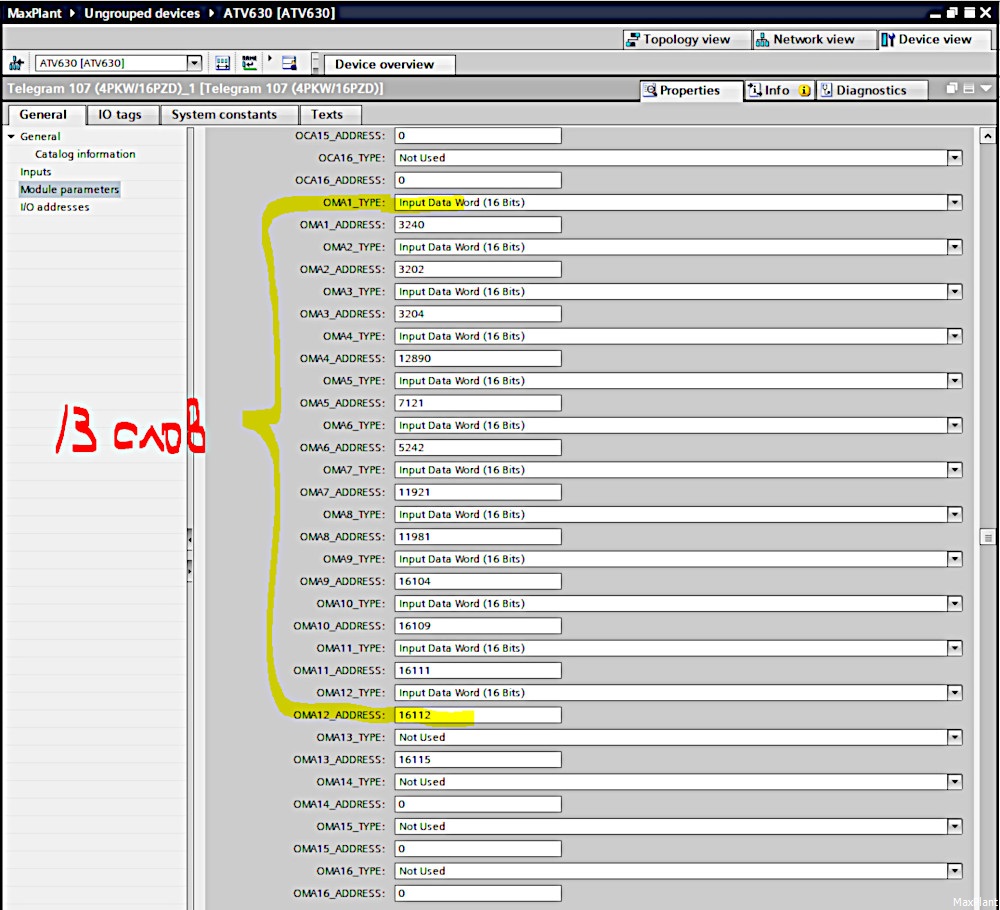
В этом примере выбраны данные ПЧ (коммуникационные параметры) с адресами:
| Имя | Адрес в ПЧ | Абсолютный адрес в ПЛК | Символьный адрес в ПЛК | Описание | |
|---|---|---|---|---|---|
| 1 | Drive state | 3240 | IW8 | HMIS | Статус привода |
| 2 | Motor frequency | 3202 | IW10 | RFR | Частота вращения двигателя, Гц |
| 3 | Motor current | 3204 | IW12 | LCR | Ток двигателя, А |
| 4 | Last warning | 12890 | IW14 | LALR | Код последнего предупреждения |
| 5 | Last Error occurred | 7121 | IW16 | LTF | Код последней ошибки |
| 6 | Physical value AI1 | 5242 | IW18 | AI1C | Физическая величина аналогового входа |
| 7 | 2nd PID preset reference | 11921 | IW20 | RP2 | Вторая предустановленная уставка задания ПИД-регулятора |
| 8 | PID feedback | 11981 | IW22 | RPF | Величина сигнала обратной связи ПИД-регулятора (фактическое значение регулируемой переменной процесса) |
| 9 | Status registers 4 | 16104 | IW24 | ST04 | 4-й регистр состояния |
| 10 | Status registers 9 | 16109 | IW26 | ST09 | 9-й регистр состояния |
| 11 | Status registers 11 | 16111 | IW28 | ST11 | 11-й регистр состояния |
| 12 | Status registers 12 | 16112 | IW30 | ST12 | 12-й регистр состояния |
| 13 | Status registers 15 | 16115 | IW32 | ST15 | 15-й регистр состояния |
Для удобства, символьные адреса в ПЛК задаём равными кодовым именам соответствующих коммуникационных параметров ATV600.
Адреса в ПЛК в предыдущей таблице получаем из следующих соображений.
Диапазон входных адресов нашего ПЧ: 0…39 (всего 40 байт):
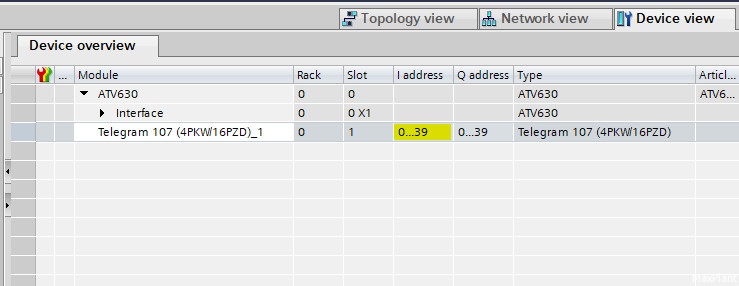
Слова этого адресного пространства адресуются так: IW0, IW2, … , IW38.
Первые 4 входных слова (IW0…IW6) мы не используем, а следующие 13 входных слов адресуются так: IW8…IW32.
Посмотрим через Watch table, какие числа мы получаем по этим адресам:
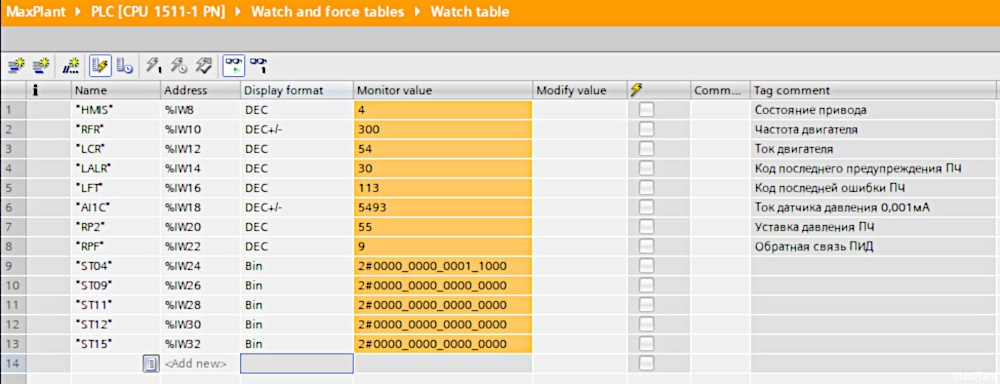
Составим таблицу соответствия между получаемыми по сети PROFINET числами и физическими значениями:
| Символьный адрес в ПЛК | Число | Значение | Описание | |
|---|---|---|---|---|
| 1 | HMIS | 4 | Running | Привод работает |
| 2 | RFR | 300 | 30 Гц | Частота вращения двигателя, Гц |
| 3 | LCR | 54 | 0,54 А | Ток двигателя, А |
| 4 | LALR | 30 | AI1 4-20 Loss Warning | Код последнего предупреждения |
| 5 | LTF | 113 | AI3 Thermal Sensor Error | Код последней ошибки |
| 6 | AI1C | 5493 | 5,4 мА | Физическая величина аналогового входа (4..20мА) |
| 7 | RP2 | 55 | 5,5 бар | Вторая предустановленная уставка задания ПИД-регулятора |
| 8 | RPF | 9 | 0,9 бар | Величина сигнала обратной связи ПИД-регулятора (фактическое значение регулируемой переменной процесса) |
Эта информация будет использоваться в программе ПЛК для преобразования получаемых чисел в числа для контроля и визуализации.
Создадим функциональный блок FB6 «Обработка данных».
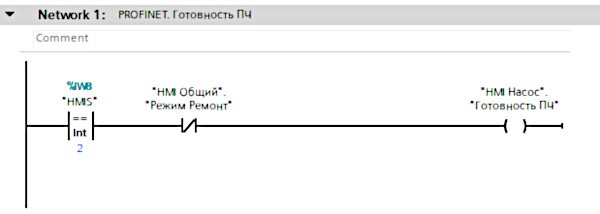
В цепочке 1 включаем индикатор «Готовность ПЧ», если код статуса привода равен 2 (Ready) и не задан режим «Ремонт»:
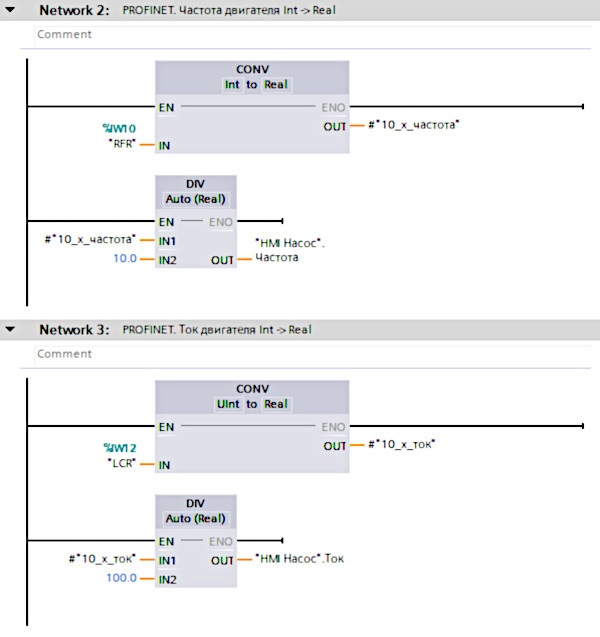
В цепочках 2 и 3 вычисляем частоту и ток двигателя: преобразуем целое число в вещественное и делим на 10 для частоты и на 100 – для тока:
Перед тем, как анализировать биты состояния вспомним особенности адресации контроллеров SIMATIC.
Слова с адресами IW0 и IW1 пересекаются – байт IB1 входит в оба слова:
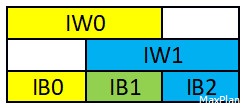
Адрес бита состоит из адреса байта и номера бита от 0 до 7. Например, адрес третьего бита в первом входном байте: I1.3.
В нашем преобразователе частоты биты в словах нумеруются от 0 до 15.
Если слово ST12 из ПЧ передаётся в слово IW30 в ПЛК, то какой адрес в ПЛК будет иметь бит 0 (который в слове ST12 равен 1 при обрыве аналогового сигнала на входе AI0)?
Этот бит окажется в крайнем правом положении слова IW30 (в байте IB31), его адрес: I31.0
Источник статьи: http://www.maxplant.ru/article/siemens_tutorial_14.php
Уроки TIA Portal, STEP7 и HMI
Урок 4
Управление дискретной задвижкой
Задание
В TIA Portal Разработать программу PLC и HMI управления дискретной задвижкой.
Решение
Для примера рассмотрим задвижку с физическим интерфейсом:
| Входы задвижки | Примечания |
|---|---|
| Открыть* | Управляющие входы настраиваем на потенциальный режим работы |
| Закрыть* | |
| Авария (Trip) | Переводит задвижку в безопасное состояние, которое выбирается с помощью настроек |
| Стоп | Останавливает привод задвижки, если входы Открыть и Закрыть настроены на импульсный режим работы |
| Выходы задвижки | |
| Открыто* | Нормально-открытые контакты концевых выключателей |
| Закрыто* | |
| М1 | Многофункциональные выходы |
| М2 | |
| Готовность* | Готовность = дистанционное управление + отсутствие неисправности |
| Неисправность |
* Сигналы со звёздочкой войдут в интерфейс ПЛК.
Входы ПЛК физически связаны с выходами задвижки для получения информации о состоянии задвижки), а выходы ПЛК физически связаны с входами задвижки для управления состоянием задвижки.
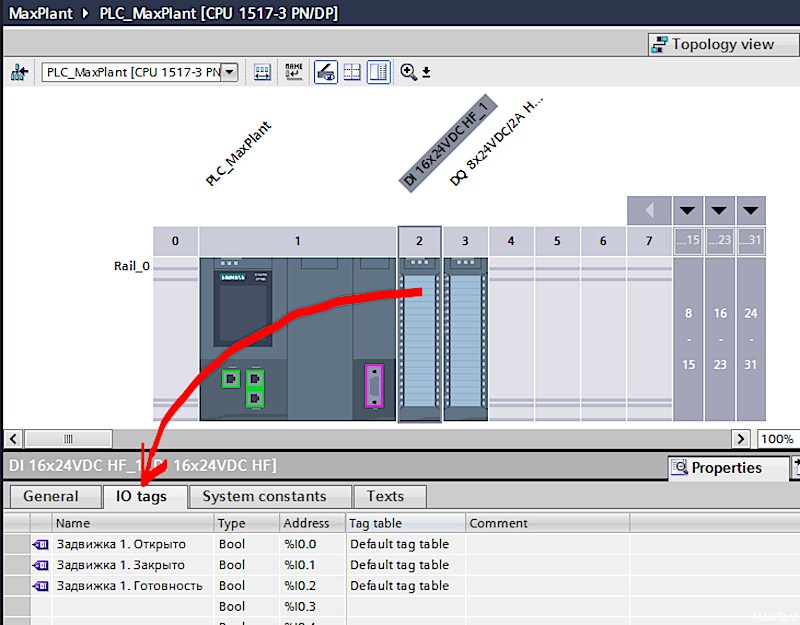
| Дискретные входы ПЛК (DI) |
|---|
| Открыто |
| Закрыто |
| Готовность |
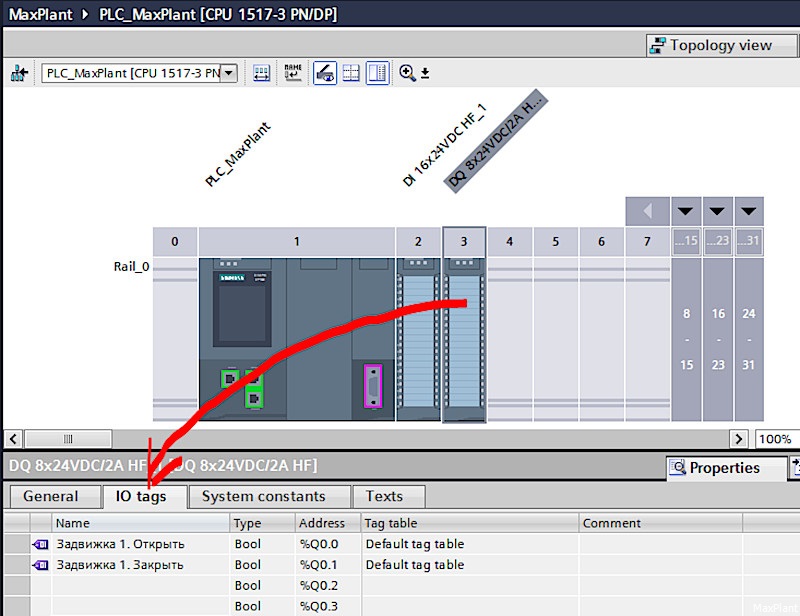
| Дискретные выходы ПЛК (DO) |
| Открыть |
| Закрыть |
| Входы | Цвет | Описание |
|---|---|---|
| Программные кнопки | ||
| Ручной режим | Зелёный фон, если режим активен | Задвижкой управляет оператор через HMI |
| Автоматический режим | Задвижка управляется автоматически программой ПЛК | |
| Открыть | Задвижка открывается/закрывается при коротком нажатии на кнопку | |
| Закрыть | ||
| Стоп | Движение задвижки прекращается | |
| Сброс | Сброс ошибки «Превышено время хода» | |
| Уставки | ||
| Время полного хода задвижки | ||
| Выходы | ||
| Индикаторы состояния | ||
| Местный режим | Зелёный фон, если режим активен | Выбирается с помощью переключателя режимов на самой задвижке Дистанционный-Местный. Задвижкой управляет оператор с помощью кнопок Открыть-Закрыть на самой задвижке. |
| Среднее положение задвижки | Серый | Не сработал ни один конечный выключатель |
| Задвижка открывается | Мигает: белый-серый | |
| Задвижка закрывается | Мигает: чёрно-серый | |
| Задвижка открыта | Белый | |
| Задвижка закрыта | Чёрный | |
| Превышено время хода задвижки | Жёлтый | Время открытия или закрытия задвижки превысило уставку времени хода |
| Авария концевых выключателей | Красный | Одновременно сработали оба концевых выключателя |
Входы графического интерфейса получают информацию о состоянии с выходов программного блока управления задвижкой, а выходы HMI управляют задвижкой через входы программного блока.
Алгоритм управления задвижкой
Задвижка управляется с местного пульта (Local) или дистанционно от ПЛК (Remote). Если полевой оператор переводит переключатель режима работы на местном пульте управления в положение «Дистанционный режим», то панельный оператор может выбрать с помощью HMI один из двух дистанционных режимов управления задвижкой: ручной или автоматический.
В дистанционном ручном режиме задвижка управляется панельным оператором с помощью программных кнопок на фейсплате HMI, в дистанционном автоматическом режиме задвижка управляется по программе ПЛК.
Если в автоматическом режиме задвижка открывается или закрывается дольше времени, заданного уставкой «Время полного хода задвижки», то выдаётся предупредительное сообщение «Превышено время хода задвижки».
Если одновременно сработали оба концевых выключателя, то выдаётся аварийное сообщение «Авария концевых выключателей».
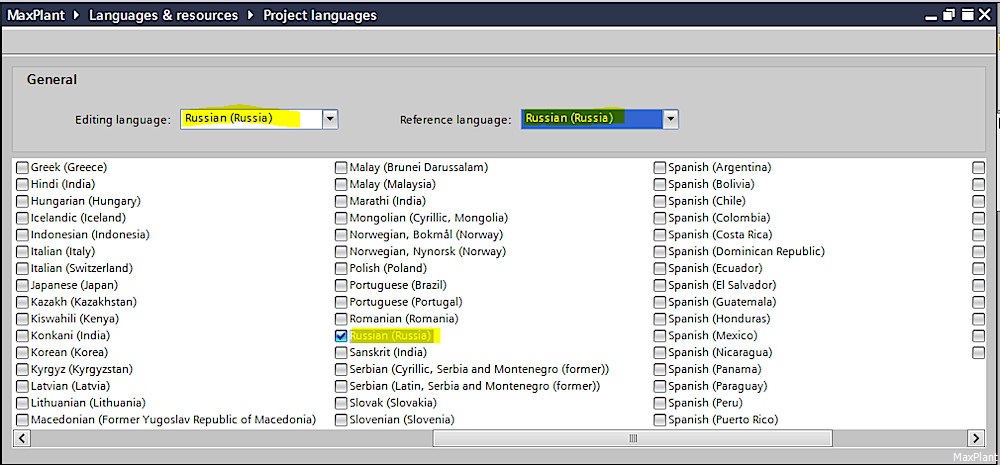
- Выбираем язык проекта:
Tools > Project languages
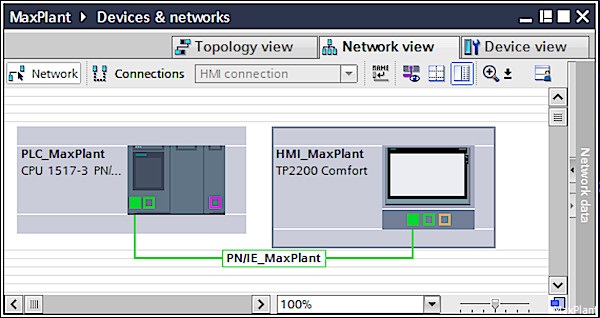
В редакторе Device Configuration конфигурируем контроллер S7-1500 и панель оператора:
| Краткое описание | Артикул | |
| 1 | CPU 1517-3 PN/DP | 6ES7 517-3AP00-0AB0 |
| 2 | DI 16x24VDC HF | 6ES7 521-1BH00-0AB0 |
| 3 | DQ 8x24VDC/2A HF | 6ES7 522-1BF00-0AB0 |
| 4 | TP2200 Comfort | 6AV2 124-0CX02-0AX0 |
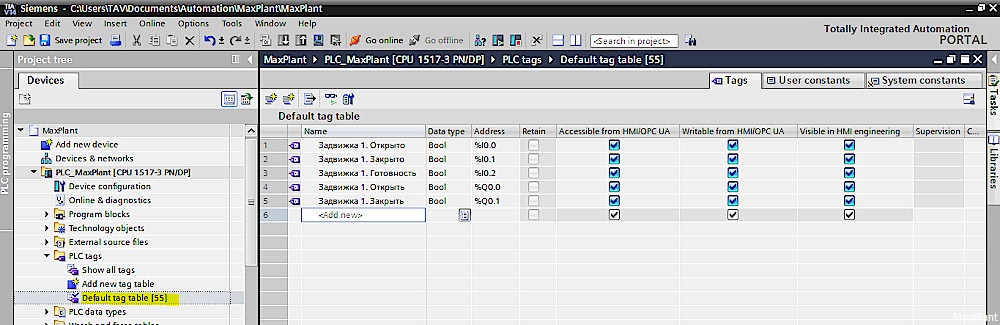
Присваиваем символьные имена тегам дискретных входов ПЛК:
Присваиваем символьные имена тегам дискретных выходов ПЛК:
В результате получаем таблицу ПЛК-тегов:
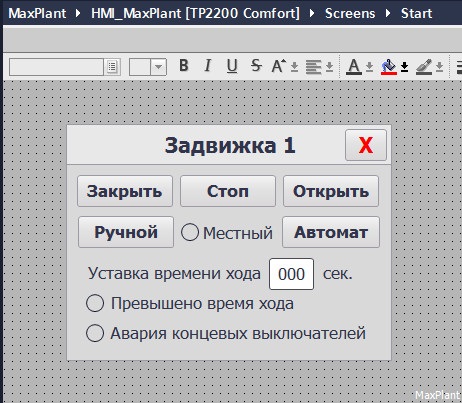
В редакторе экранов панели оператора создаём новый экран с именем Start и конфигурируем графический HMI интерфейс управления задвижкой (пока без привязки к тегам):
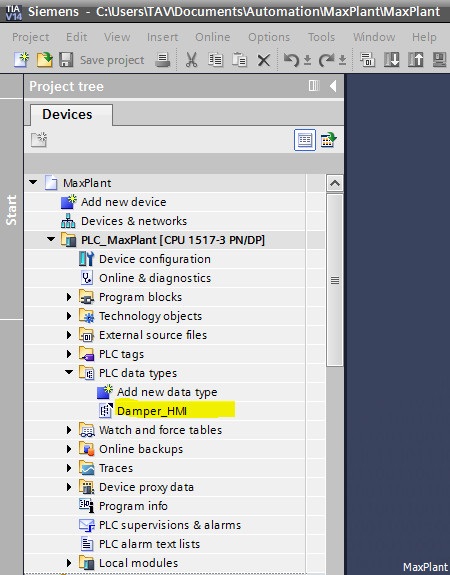
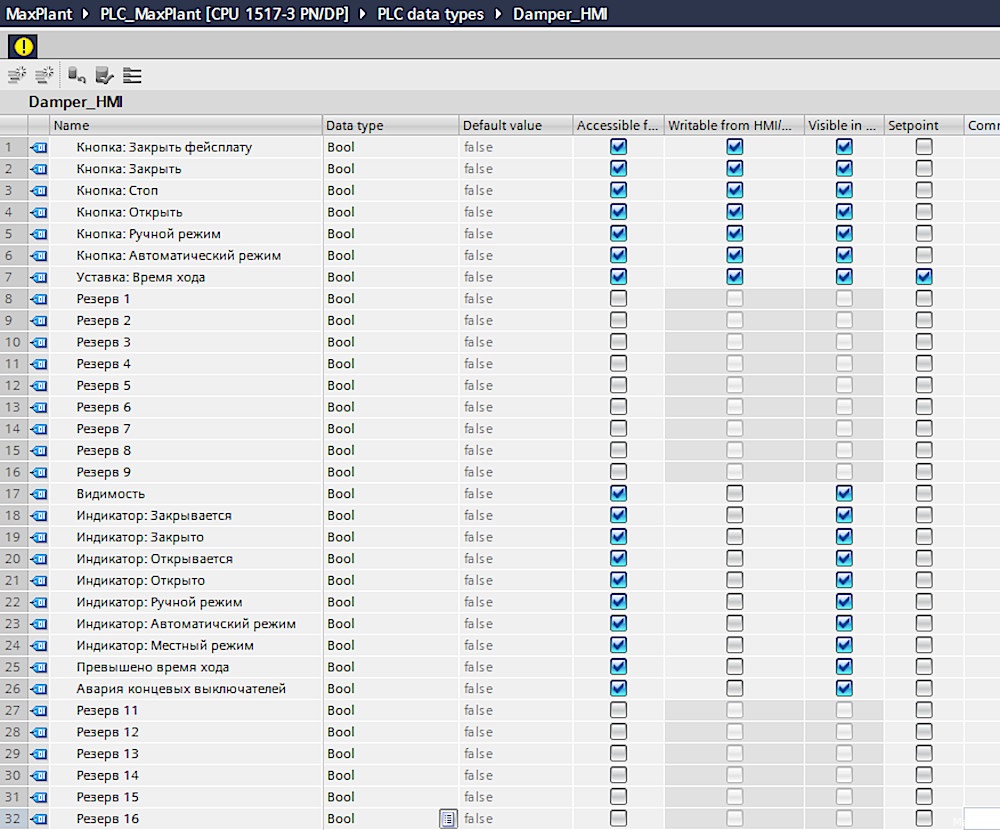
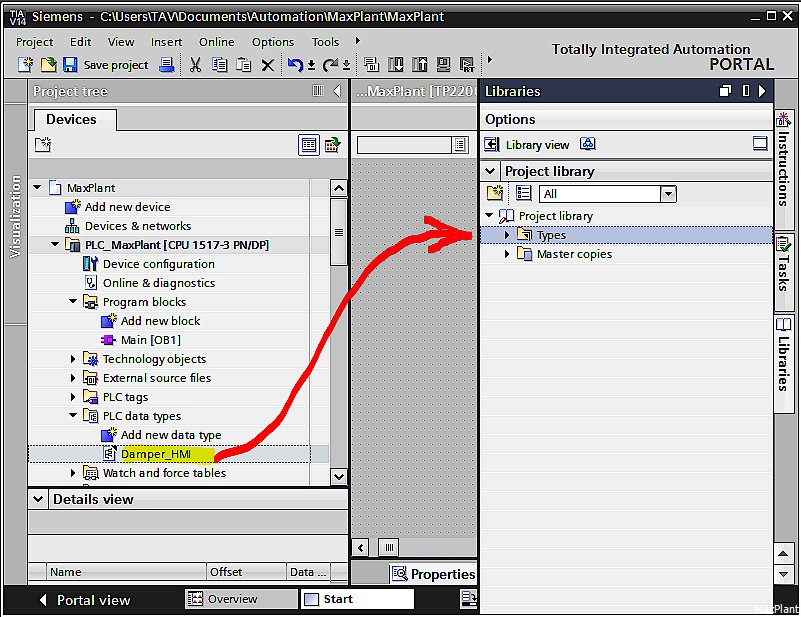
Создаём тип данных PLC data type с именем Damper_HMI, который пригодится для создания фейсплаты HMI задвижки:
Перетаскиваем мышкой созданный тип данных ПЛК в библиотеку проекта:
Генерируем глобальный блок данных, через который HMI будет обмениваться данными с программным функциональным блоком:
Добавляем в блок данных один тег с именем «Интерфейс» и структурным типом Damper_HMI:
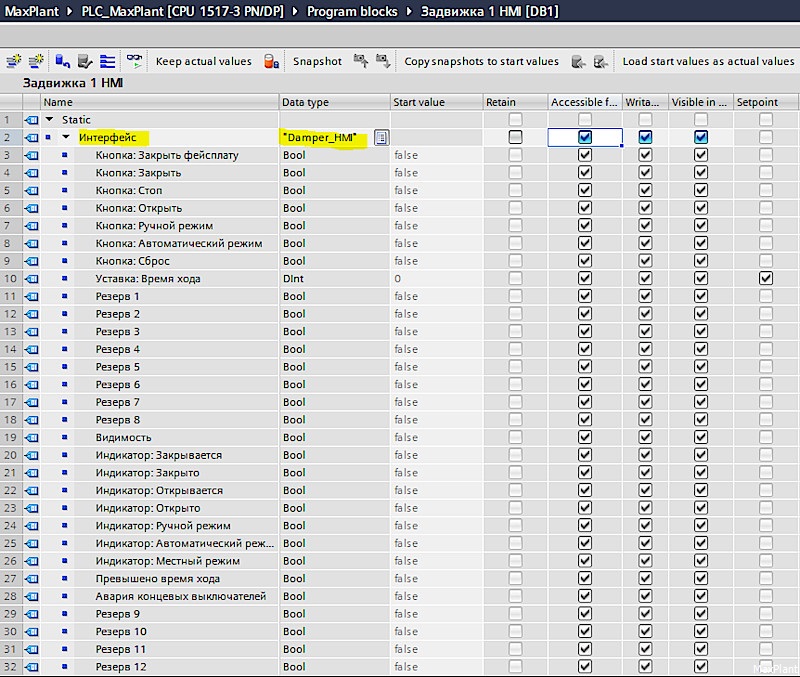
- Тег «Интерфейс» состоит из двух слов по 16 бит:
- Данные ввода HMI задвижки передаются в первое слово
- Данные вывода HMI задвижки передаются из второго слова
Продолжение в следующих уроках:
- создание фейсплаты HMI задвижки
- программирование управления задвижкой.
Источник статьи: http://www.maxplant.ru/article/siemens_tutorial_4.php